
robotpaper.challengeさんのイラストまとめ
@robotpaper_cFollow @robotpaper_cさんをフォローする
ロボティクス分野のトレンド把握&作成,トップ会議のサーベイ、投稿を行っています.学生,社会人,誰でも参加可能です.
HP : sites.google.com/view/robotpape…
mail : [email protected]
HP : sites.google.com/view/robotpape…
mail : [email protected]
フォロー数:19 フォロワー数:1995
3 件中 1〜3件を表示


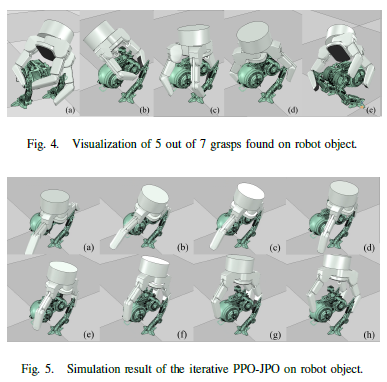
多指のhandで精密把持を探索するための最適化モデルの提案.モデルは対象物のノイズの多い点群を入力とし,最適化し衝突を回避するために,計画問題をペナルティ付き最適化に定式化し,手のひらの姿勢最適化(PPO)と関節位置最適化(JPO)の反復によって解いている.
11
24
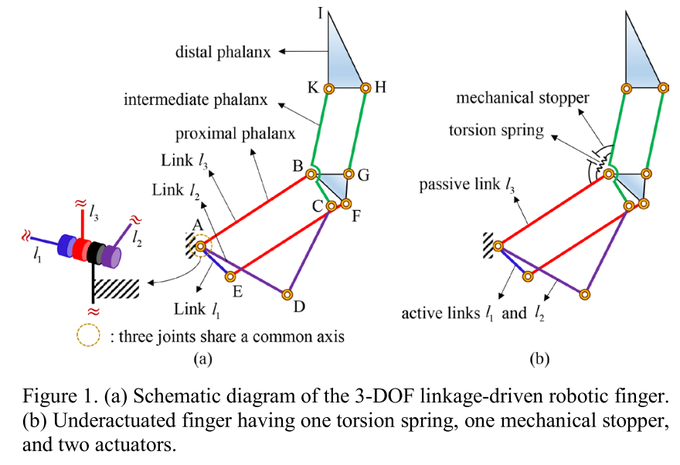

平行リンク機構などを利用した,3自由度の劣駆動ハンド指の開発を行なっています.指の動きを制御し,受動的な包み込み把持,平行把持などの様々な把持手法を適用することができています.2指グリッパの機構で把持手法ごとの指先の軌道を設計し,把持実験を行なっています.
5
15
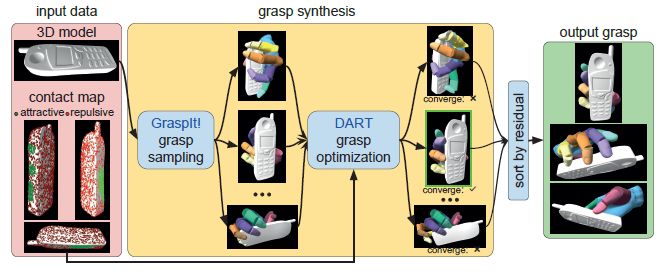
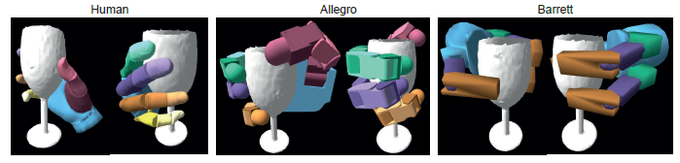
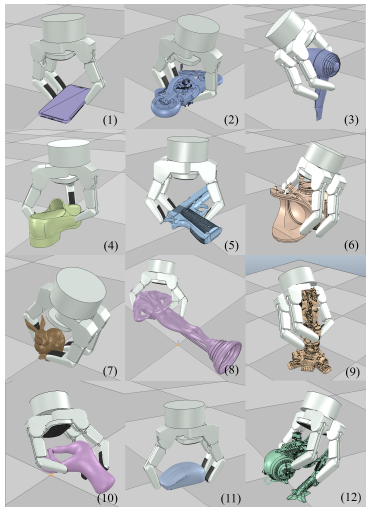
物体形状と物体表面の接触から機能的な把持合成を行うのframeworkの提案
接触は手動指定または,デモで取得することも可能.接触表現は物体中心の表現であり,デモに使用されているものとは異なる手のモデルでも機能的な把持を合成することが可能.
3つの手モデル,19の家庭用物体,2つの把持で検証した.
3
8