cloudcompareのTwitterイラスト検索結果。 4 件


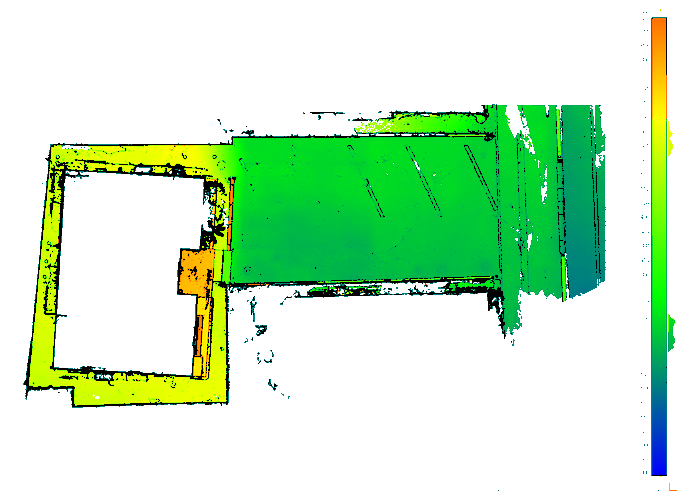



このアクティブノイズフィルターはスキャン中に判断されたノイズを色分けしてくれる機能だけど、ノイズ点群も残していて、後からCloudCompareのSFで確認、フィルタリングできる(鳥居部分など)。#Zappcha https://t.co/4EZHCiuO7A
0
7




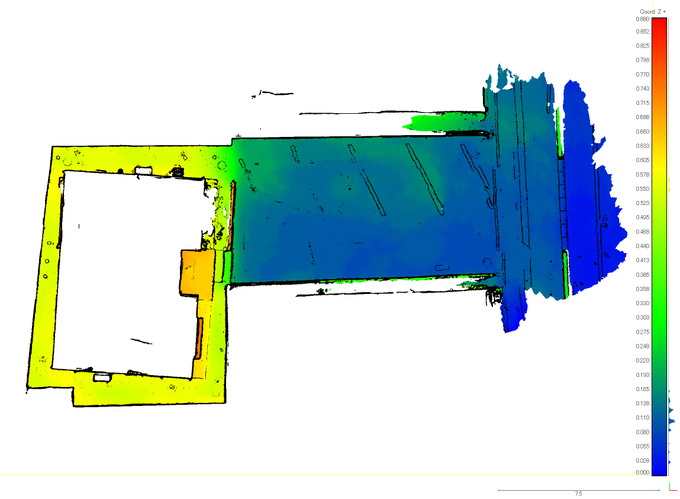
UAVでは再建されなかった箇所を #iPhoneLiDAR でスキャンして合成した。
@SiteScapeAI Area-High
#CloudCompare の SOR filterと、Roughness(0.04)→0.004でExportしてノイズ除去。
4
23
もし、気にっていただけましたらTwitterやブログで宣伝していただけると管理人が喜びます。
ツイートする