二名川さんのイラストまとめ
@Ninagawa123Follow @Ninagawa123さんをフォローする
ロボットデザイナーにながわ。
#Meridian計画 を進行中。
趣味はレトロゲーム機の修理。本業は会社員。
youtube.com/channel/UC_d8c…#Meridian計画 を進行中。
趣味はレトロゲーム機の修理。本業は会社員。
フォロー数:2165 フォロワー数:3040
16 件中 1〜10件を表示


今日はつま先の概念を作った。つま先があればより自然な表現ができるようになるはず。
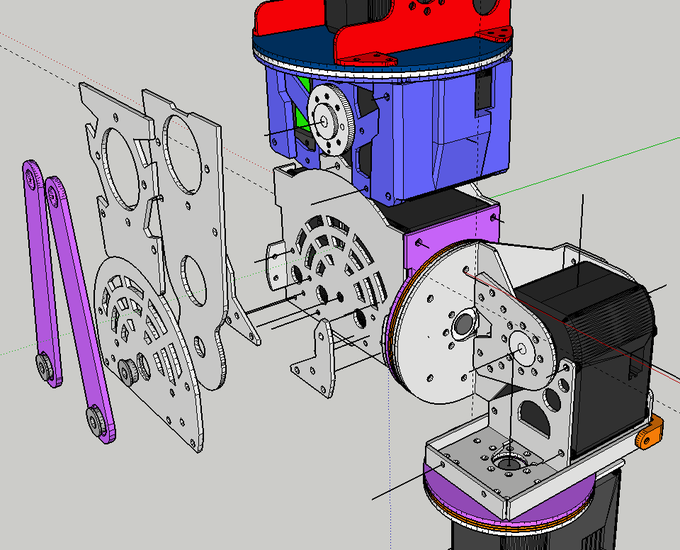
長穴減速が軸位置のオフセットを兼ねるので、パワーUP・精度UP・コンパクト化をまとめて実現できる。
たぶん最小手順の最適解。
ただし足先にサーボが3つもくるのが難。要調整。
19
129



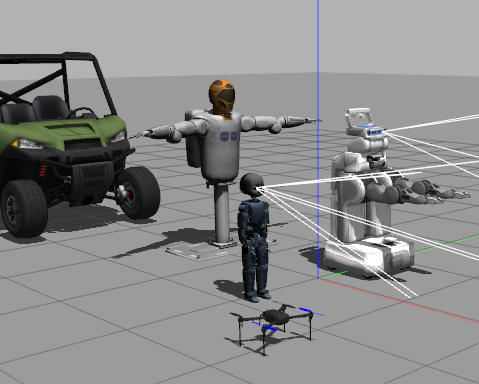
gazeboに召喚できそうなモデルを集めて基本姿勢の確認。
ヒューマノイドのiCubは気をつけの姿勢をデフォルトにしている様子。
他の2体は胴体にアームロボットをつけた状態と考えれば取り付け箇所に対して水平に伸びているのは自然。
クルマとドローンはx軸を前方にしているかどうかの確認用。
3
24

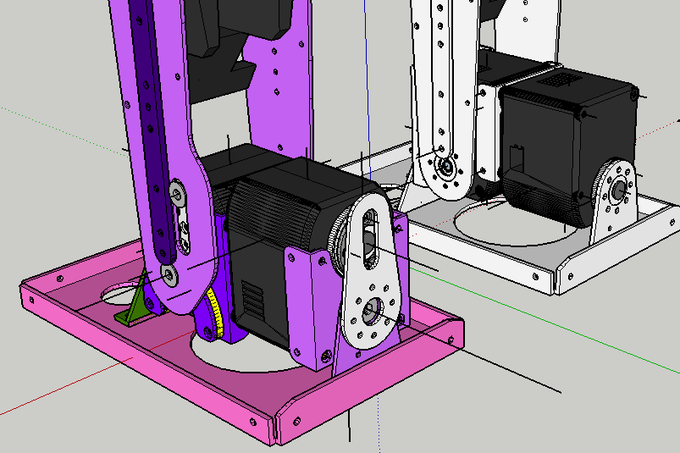
足首の長穴減速を本導入。減速比1:1で設定。踝ロール軸はは2500で長穴。踝ピッチ軸は幅の都合で4034のまま長穴。分解性と配線取り回しを見直し。足の長さは組み換えで2段階に調整できるようにした。トリム用簡易ゲージもフレーム上にマーキング。
0
21

スコブルの設計最適化作業。胴体3箇所のサーボを4032→2552or2572に置き換えることで軽量化が測れそう。胴長を1センチ以上短くできそうなのでプロポーションと運用バランスも改善される。今までは背が高すぎた。
0
19